%%capture
!pip install kornia
!pip install kornia-rs
!pip install kornia_moons --no-deps
!pip install opencv-python --upgradeImage matching example with LightGlue and DISK
Intermediate
LightGlue
Disk
LAF
Image matching
kornia.feature
In this tutorial we are going to show how to perform image matching using a LightGlue algorithm with DISK
![]()
First, we will install everything needed:
- fresh version of kornia for DISK
- fresh version of OpenCV for MAGSAC++ geometry estimation
- kornia_moons for the conversions and visualization
Docs: kornia.feature.DISK
Now let’s download an image pair
import io
import requests
def download_image(url: str, filename: str = "") -> str:
filename = url.split("/")[-1] if len(filename) == 0 else filename
# Download
bytesio = io.BytesIO(requests.get(url).content)
# Save file
with open(filename, "wb") as outfile:
outfile.write(bytesio.getbuffer())
return filename
url_a = "https://github.com/kornia/data/raw/main/matching/kn_church-2.jpg"
url_b = "https://github.com/kornia/data/raw/main/matching/kn_church-8.jpg"
download_image(url_a)
download_image(url_b)'kn_church-8.jpg'First, imports.
import cv2
import kornia as K
import kornia.feature as KF
import matplotlib.pyplot as plt
import numpy as np
import torch
from kornia.feature.adalam import AdalamFilter
from kornia_moons.viz import *
device = K.utils.get_cuda_or_mps_device_if_available()
print(device)mpsHere we show how to use LightGlue with provided kornia LightGlueMatcher interface
# %%capture
fname1 = "kn_church-2.jpg"
fname2 = "kn_church-8.jpg"
lg_matcher = KF.LightGlueMatcher("disk").eval().to(device)
img1 = K.io.load_image(fname1, K.io.ImageLoadType.RGB32, device=device)[None, ...]
img2 = K.io.load_image(fname2, K.io.ImageLoadType.RGB32, device=device)[None, ...]
num_features = 2048
disk = KF.DISK.from_pretrained("depth").to(device)
hw1 = torch.tensor(img1.shape[2:], device=device)
hw2 = torch.tensor(img2.shape[2:], device=device)
with torch.inference_mode():
inp = torch.cat([img1, img2], dim=0)
features1, features2 = disk(inp, num_features, pad_if_not_divisible=True)
kps1, descs1 = features1.keypoints, features1.descriptors
kps2, descs2 = features2.keypoints, features2.descriptors
lafs1 = KF.laf_from_center_scale_ori(kps1[None], torch.ones(1, len(kps1), 1, 1, device=device))
lafs2 = KF.laf_from_center_scale_ori(kps2[None], torch.ones(1, len(kps2), 1, 1, device=device))
dists, idxs = lg_matcher(descs1, descs2, lafs1, lafs2, hw1=hw1, hw2=hw2)
print(f"{idxs.shape[0]} tentative matches with DISK LightGlue")Loaded LightGlue modelAnd here the same with original LightGlue object
lg = KF.LightGlue("disk").to(device).eval()
image0 = {
"keypoints": features1.keypoints[None],
"descriptors": features1.descriptors[None],
"image_size": torch.tensor(img1.shape[-2:][::-1]).view(1, 2).to(device),
}
image1 = {
"keypoints": features2.keypoints[None],
"descriptors": features2.descriptors[None],
"image_size": torch.tensor(img2.shape[-2:][::-1]).view(1, 2).to(device),
}
with torch.inference_mode():
out = lg({"image0": image0, "image1": image1})
idxs = out["matches"][0]
print(f"{idxs.shape[0]} tentative matches with DISK LightGlue")724 tentative matches with DISK LightGlueRANSAC to get fundamental matrix
def get_matching_keypoints(kp1, kp2, idxs):
mkpts1 = kp1[idxs[:, 0]]
mkpts2 = kp2[idxs[:, 1]]
return mkpts1, mkpts2
mkpts1, mkpts2 = get_matching_keypoints(kps1, kps2, idxs)
Fm, inliers = cv2.findFundamentalMat(
mkpts1.detach().cpu().numpy(), mkpts2.detach().cpu().numpy(), cv2.USAC_MAGSAC, 1.0, 0.999, 100000
)
inliers = inliers > 0
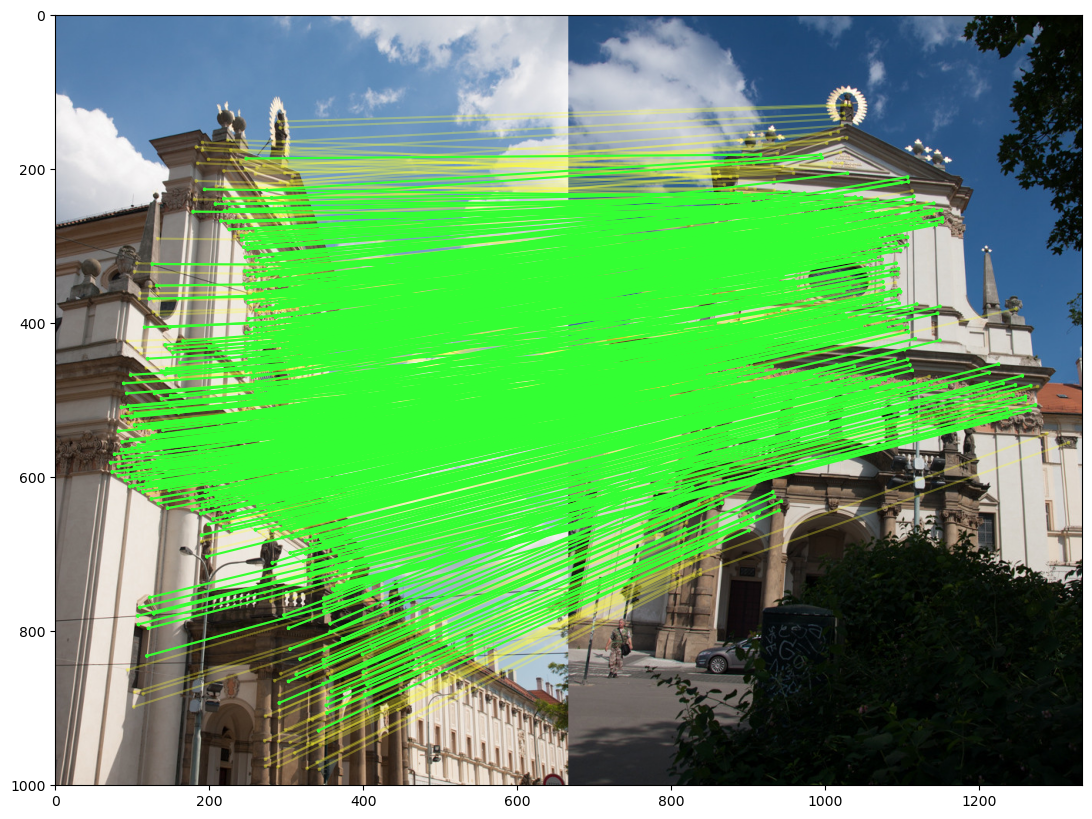
print(f"{inliers.sum()} inliers with DISK")Let’s draw the inliers in green and tentative correspondences in yellow
draw_LAF_matches(
KF.laf_from_center_scale_ori(kps1[None].cpu()),
KF.laf_from_center_scale_ori(kps2[None].cpu()),
idxs.cpu(),
K.tensor_to_image(img1.cpu()),
K.tensor_to_image(img2.cpu()),
inliers,
draw_dict={"inlier_color": (0.2, 1, 0.2), "tentative_color": (1, 1, 0.2, 0.3), "feature_color": None, "vertical": False},
)