%%capture
!pip install kornia
!pip install kornia-rs
!pip install kornia_moons
!pip install opencv-python --upgradeImage matching example with KeyNet-AdaLAM
Intermediate
KeyNet
LAF
Adalam
Image matching
kornia.feature
In this tutorial we are going to show how to perform image matching using a KeyNet-Adalam Algorithm
![]()
First, we will install everything needed:
- fresh version of kornia for AdaLAM
- fresh version of OpenCV for MAGSAC++ geometry estimation
- kornia_moons for the conversions and visualization
Docs: match_adalam
Now let’s download an image pair
import io
import requests
def download_image(url: str, filename: str = "") -> str:
filename = url.split("/")[-1] if len(filename) == 0 else filename
# Download
bytesio = io.BytesIO(requests.get(url).content)
# Save file
with open(filename, "wb") as outfile:
outfile.write(bytesio.getbuffer())
return filename
url_a = "https://github.com/kornia/data/raw/main/matching/kn_church-2.jpg"
url_b = "https://github.com/kornia/data/raw/main/matching/kn_church-8.jpg"
download_image(url_a)
download_image(url_b)'kn_church-8.jpg'First, imports.
import cv2
import kornia as K
import kornia.feature as KF
import matplotlib.pyplot as plt
import numpy as np
import torch
from kornia_moons.viz import *
# device = K.utils.get_cuda_or_mps_device_if_available()
device = torch.device("cpu")%%capture
fname1 = "kn_church-2.jpg"
fname2 = "kn_church-8.jpg"
img1 = K.io.load_image(fname1, K.io.ImageLoadType.RGB32, device=device)[None, ...]
img2 = K.io.load_image(fname2, K.io.ImageLoadType.RGB32, device=device)[None, ...]
feature = KF.KeyNetAffNetHardNet(5000, True).eval().to(device)
input_dict = {
"image0": K.color.rgb_to_grayscale(img1), # LofTR works on grayscale images only
"image1": K.color.rgb_to_grayscale(img2),
}
hw1 = torch.tensor(img1.shape[2:])
hw2 = torch.tensor(img1.shape[2:])
adalam_config = {"device": device}
with torch.inference_mode():
lafs1, resps1, descs1 = feature(K.color.rgb_to_grayscale(img1))
lafs2, resps2, descs2 = feature(K.color.rgb_to_grayscale(img2))
dists, idxs = KF.match_adalam(
descs1.squeeze(0),
descs2.squeeze(0),
lafs1,
lafs2, # Adalam takes into account also geometric information
config=adalam_config,
hw1=hw1,
hw2=hw2, # Adalam also benefits from knowing image size
)print(f"{idxs.shape[0]} tentative matches with AdaLAM")405 tentative matches with AdaLAMdef get_matching_keypoints(lafs1, lafs2, idxs):
mkpts1 = KF.get_laf_center(lafs1).squeeze()[idxs[:, 0]].detach().cpu().numpy()
mkpts2 = KF.get_laf_center(lafs2).squeeze()[idxs[:, 1]].detach().cpu().numpy()
return mkpts1, mkpts2
mkpts1, mkpts2 = get_matching_keypoints(lafs1, lafs2, idxs)
Fm, inliers = cv2.findFundamentalMat(mkpts1, mkpts2, cv2.USAC_MAGSAC, 0.75, 0.999, 100000)
inliers = inliers > 0
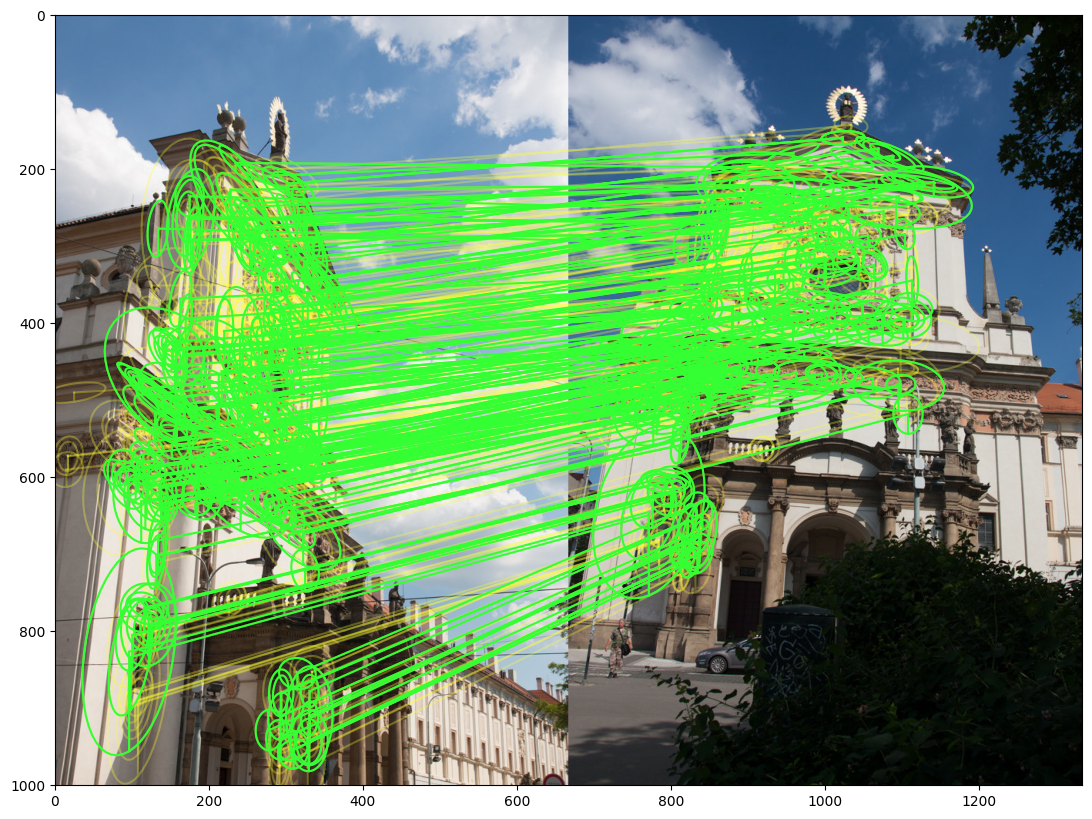
print(f"{inliers.sum()} inliers with AdaLAM")195 inliers with AdaLAMLet’s draw the inliers in green and tentative correspondences in yellow
draw_LAF_matches(
lafs1,
lafs2,
idxs,
K.tensor_to_image(img1),
K.tensor_to_image(img2),
inliers,
draw_dict={"inlier_color": (0.2, 1, 0.2), "tentative_color": (1, 1, 0.2, 0.3), "feature_color": None, "vertical": False},
)